近日,信息工程学院郑重博士与来自其他高校的合作者们通过直接利用向量测量信息作为反馈信号,提出了一种新颖的分布式姿态协同控制方法,研究了多颗挠性航天器的姿态一致性控制,在姿态机动过程中抑制了挠性模态振动,实现了几乎全局渐近稳定的控制目标,并且给出了保证系统稳定的吸引区范围。对于存在执行器故障和外部扰动的情形,设计了鲁棒自适应控制方法,实现了较好的控制性能。本项研究避免了传统姿态控制要把向量测量信息转换为四元数或罗德里格斯参数等姿态参数的复杂过程,对于提高航天器高精度高稳定度姿态控制水平,保障航天器在复杂空间环境下的稳定运行具有实际意义。
图1 航天器编队示意图
挠性航天器的姿态协同控制问题是卫星编队飞行领域的重要研究内容之一。对于挠性航天器而言,不但要实现多颗航天器的姿态一致性控制,并且还要抑制挠性模态振动。通过严谨的数学推导和仿真实验验证,作者们证明了所提出的控制策略在几乎全局范围内具有渐近稳定的控制性能,并给出了保证系统稳定的吸引区范围。此外,针对实际应用中可能出现的执行器故障和外部扰动,作者们还设计了一种鲁棒自适应控制方法,实现了较好的控制性能。
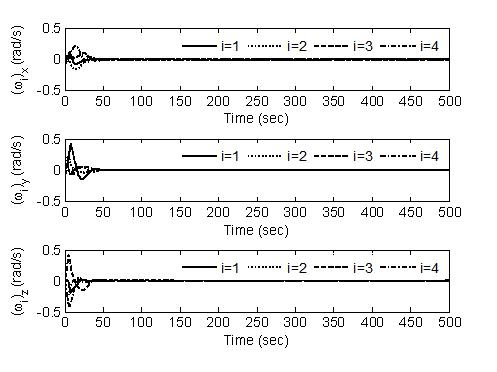
图2 航天器角速度变化趋势
为了进一步提高控制性能,该项研究还对所提出的控制策略进行了优化。首先,通过在控制器中引入自适应参数调节机制,使系统能够自适应地调整控制参数,以适应航天器结构和外部环境的变化。其次,采用了非线性控制策略,以更好地应对航天器姿态动力学中的强非线性动态。最后,还对控制算法进行了改进,以提高其在存在执行器故障和外部扰动情况下的鲁棒性。通过仿真实验验证,所提出的控制策略在挠性航天器的姿态协同控制问题中具有较高的实用价值,不仅在保证系统稳定的同时有效抑制了挠性模态振动,而且在面对执行器故障和外部扰动时仍能实现较好的控制性能。这些成果的取得,为挠性航天器的姿态协同控制问题提供了一种有效的解决方案。
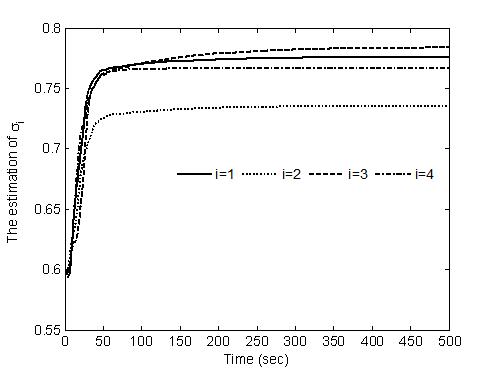
图3 自适应参数变化趋势

图4 航天器挠性模态曲线变化趋势
相关研究成果以“Fault-tolerant attitude coordination control for multiple flexible spacecraft using vector measurements”为题发表在SCI期刊Advances in Space Research(中科院三区,IF:2.6)上。江苏开放大学信息工程学院郑重博士为论文的第一作者和通信作者,其他合作者有南京航空航天大学陈提教授、贾庆贤副教授、南京工业大学周峰教授和湘潭大学李鹏教授。该研究得到国家自然科学基金、湖南省自然科学基金和湖南省教育厅重点项目的资助与支持。
论文信息:
Fault-tolerant attitude coordination control for multiple flexible spacecraft using vector measurements
Zhong Zheng,Ti Chen,Feng Zhou,Qingxian Jia,Peng Li
Advances in Space Reasearch 72(6), Pages: 1931-1943 (2023)
文章链接:https://www.sciencedirect.com/science/article/pii/S0273117723003733
WOS: 001050190300001

