近日,信息工程学院机器人与智能制造科研团队在狭窄通道机器人路径规划领域取得重要进展,相关成果以《Implementation of two-roller scheduling path planning under road construction scenarios》在国际学术期刊《Scientific Reports》(SCI二区)上发表。该论文作者除许曈、周志轩两位指导教师外,开拓者社团成员刘俊豪同学也作为共同作者署名,充分体现了学院“以科研育人才、以实践促创新”的培养理念。
本研究聚焦道路施工场景下两机器人的高效调度问题,从全局路径设计、避障策略优化等维度提出创新性算法框架。在许曈、周志轩老师的悉心指导下,来自开拓者社团的刘俊豪同学全程参与了搭建仿真实验平台和优化方案测试等环节。
作为信息工程学院重点扶持的学生科技社团,近年来开拓者协会在学院科研团队的指导下屡创佳绩。该社团已形成“导师引领、项目驱动、以赛促学”的特色培养模式,多位社团成员在各类科技创新竞赛中斩获佳绩。
未来,信息工程学院持续深化科研育人改革,通过“科研团队+学生社团”的联动机制,为像开拓者社团这样的学生科技组织提供,为学生搭建参与前沿科研项目的平台,不断完善“教学-科研-竞赛”一体化培养体系,为高质量人才培养与学科建设注入新动能。
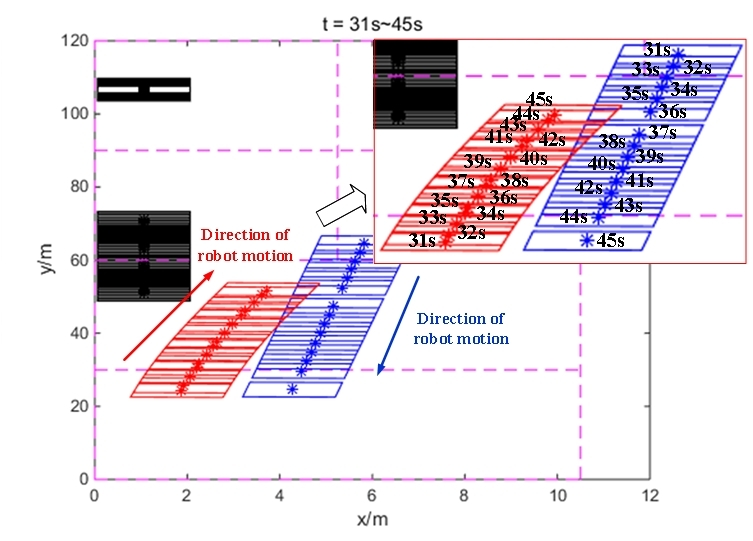
图1 31秒至45秒时间内两机器人调度效果的仿真展现
(图、文:许曈 审核:王小军)

