近期,信息工程学院机器人智能制造团队在知识产权创造、高水平论文发表及产教融合平台建设三个方面取得阶段性突破,展现了“双带头人”教师党支部书记工作室引领下的团队协同创新能力。
一、两项发明专利获授权,核心关键技术形成保护
2026年3月,团队接连获得两项国家发明专利授权,标志着在运动控制与智能感知领域形成实质性技术积累。
(1)一种弹道轨迹修正方法专利号:2022116972277授权日:2026 03 24发明人:雷晓云、范骏
该专利公开了一种弹道轨迹修正方法,具体步骤如下:首先预设弹体状态量、脉冲推力修正器对弹体修正的动作集、击中点的修正范围以及该修正范围内的目标点;然后以弹体当前状态为输入,以动作集中下一时刻的最大奖励值对应的动作为输出,构建策略预测模型;在模型运行过程中,分别计算奖励值和代价值,并利用代价值对奖励值进行更新,进而更新策略预测模型;之后结合交叉熵函数计算当前状态执行的动作和下一时刻执行的动作,最终获得最优策略预测模型。在实际应用中,根据采集到的弹体状态,输入最优策略预测模型,即可输出弹道轨迹修正结果。本发明为飞行轨迹修正领域提供了一种智能化动作序列决策手段,旨在提高轨迹修正精度。
(2)一种基于多类特征学习的信号识别方法、系统、电子设备和存储介质专利号:2023101294181授权日:2026 03 31第一发明人:许曈
本专利公开了一种基于多类特征学习的信号识别方法、系统、电子设备及存储介质,面向通信、雷达、射频等信号分类场景。针对现有技术单一特征识别效果差、高维特征存在冗余与过拟合的问题,该方案先提取时域、频域、时频域等多类信号特征,并完成高维特征筛选以剔除冗余信息;依托一维残差网络开展特征学习,构建召回率矩阵量化不同特征对各类信号的识别能力,再结合样本修正矩阵参数,通过多特征融合策略完成最终分类判定。本方案实现多特征优势互补,有效提升信号识别准确率与模型泛化能力,硬件适配性强,可广泛应用于电磁频谱监测、信号调制识别、雷达信号分选等领域。
二、高水平论文持续产出,能源与结构工程双线突破
2026年上半年,团队在国际权威期刊发表(含在线发表)SCI一区论文2篇,研究领域覆盖生物能源与工程力学。
(1)Enhancing biomass and lipid productivity in Chlorella vulgaris through CPPU mediated growth and photosynthetic regulation期刊:Renewable Energy, 2026, 256: 124372(Top刊,SCI一区,IF=9.0)作者:Zhang L, Chinnathambi A, Raghavendra T 等
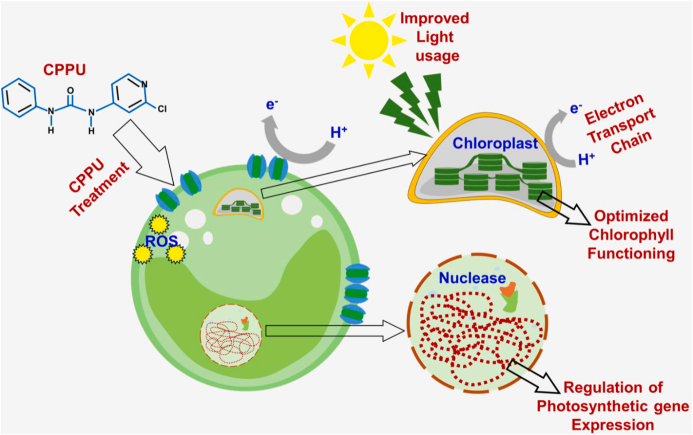
该研究创造性地从生物燃料能量产出的视角,报道了植物生长调节剂CPPU(氯吡脲)对普通小球藻作为燃料前体的提质效应。实验表明,在优化浓度下,CPPU可使小球藻的比生长速率提高约42%,单位细胞脂质含量提升约57%。这两项指标直接决定了单位培养周期的生物质产量和可转化的油脂总量。与此同时,CPPU处理未对光合系统的能量捕获效率(以最大量子产率为表征)产生显著负面影响,意味着能量输入与生物质输出的转化关系保持稳定。
通过分析胞内碳流分配,研究揭示CPPU促进了碳骨架向油脂合成方向的净通量——上调脂肪酸合成相关基因,同时抑制脂质降解途径。这种碳流的重新分配,本质上是将更多光合作用固定的化学能储存在油脂分子中,而非用于其他代谢消耗。中试光生物反应器的初步验证表明,该化学调控策略在不同培养规模下具有可重复性,为后续热化学转化(如热解、酯交换)提供了稳定的富油原料来源。
(2)A hybrid approach for elastic plastic impact analysis of plate considering strain rate effects期刊:Journal of Constructional Steel Research, 2026, 236: 109990(SCI二区,IF:4.0)作者:Zhang L, Tan Y, Jin T
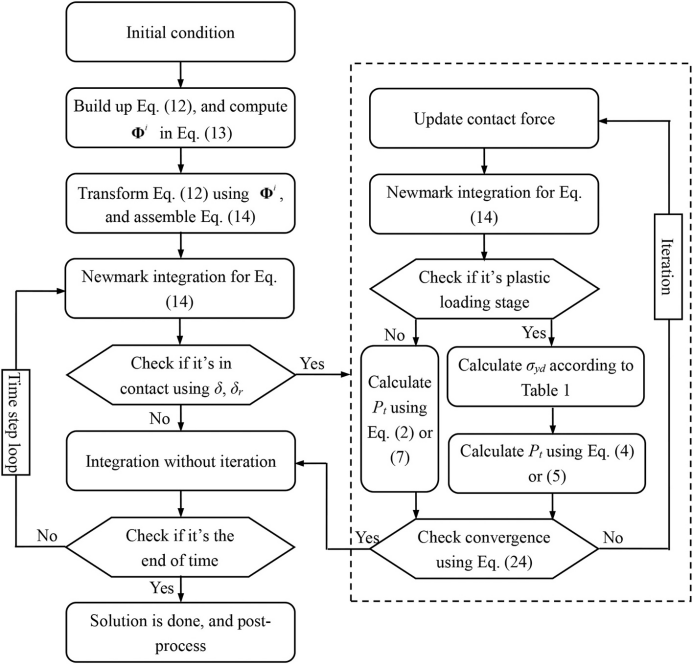
该论文针对金属板壳结构在冲击载荷下的弹塑性响应分析,提出了一种混合解析 数值方法。传统有限元方法在细网格下精度高但计算耗时长,而工程经验公式虽快但难以准确考虑应变率效应和复杂边界。本文的创新在于:将板壳动力响应分解为膜力主导的整体变形和弯曲主导的局部压入,分别建立考虑Cowper Symonds应变率本构的解析解,再通过少量数值修正因子进行耦合。该方法在预测中心挠度、永久凹陷深度和临界贯穿速度时,与LS DYNA精细仿真结果的相对误差低于8%,而计算时间减少两个数量级以上。该工作为舰船舷侧防护、车辆抗冲击设计等需要大量参数扫描的场景提供了一种高效且可信的工程工具。
三、产教融合走深走实,“红齿轮”驱动“蓝智造”服务区域转型
作为科研成果的延伸应用和育人反哺,团队依托校级“双带头人”教师党支部书记工作室以机电工程系和智能制造系两个党支部的书记项目为抓手,于2026年6月1–7日举办了“开放杯”机器人底盘设计与调试培训。来自常州、昆山、无锡、徐州、张家港五所开放大学的9名师生参加为期6天的全封闭实训,内容涵盖机器人底盘拆装、CAN通信、电机调试及RTOS控制代码解析,实操占比超80%。3名往届优秀毕业生(其中2名学生党员)返校担任助教,体现了育人延续性。

培训面向全省开放大学体系免费开放,所有教学资源(三维模型、指导手册、代码库)已通过超星学习通分享并建立常态化答疑通道。下一步团队将继续围绕技术巡诊、横向项目等方向为江苏制造业数智转型提供“红齿轮”动力。
图/文:机器人与智能制造科研团队,审核:王小军

